Dana Vrajitoru
B424 Parallel and Distributed Programming
Numerical Parallel Algorithms
Systems of Linear Equations
- Find x0, x1, ..., xn-1 such that
a0,0 x0 + a0,1 x1 +
... + a0,n-1 xn-1 = b0
a1,0 x0 + a1,1 x1 +
... + a1,n-1 xn-1 = b1
...
an-1,0 x0 + an-1,1 x1
+ ... + an-1,n-1 xn-1 = bn-1
- In matrix form we can write Ax = b, where A is an n x n matrix,
and x and b are vectors of size n.
- Numerous applications.
Gauss Elimination
- A commonly used method to solve systems of linear equations. A x = b,
- The objective is to turn the matrix A into a triangular one.
- We start by multiplying the first row by a constant then
subtracting it from the second one such that the first element in the
second row becomes 0.
- We repeat this for each remaining row.
- A triangular system of linear equations is easy to solve.
- Time complexity: O(n3).
Sequential Algorithm
for (i=0; i < n-1; i++) {
for (j=i+1; j < n; j++) {
m = a[j][i]/a[i][i]; // multiplier
for (k=j; k < n; k++){
a[j][k] = a[j][k] - a[i][k]*m;
}
b[j]=b[j] - b[i]*m; // adjust b too
}
}
Computing the Solution
x[n-1] = b[n-1]/a[n-1][n-1];
for (i=n-2; i >= 0; i--) {
r = b[i];
for (j=i+1; j < n; j++)
r = r - a[i][j]*x[j];
x[i] = r / a[i][i];
}
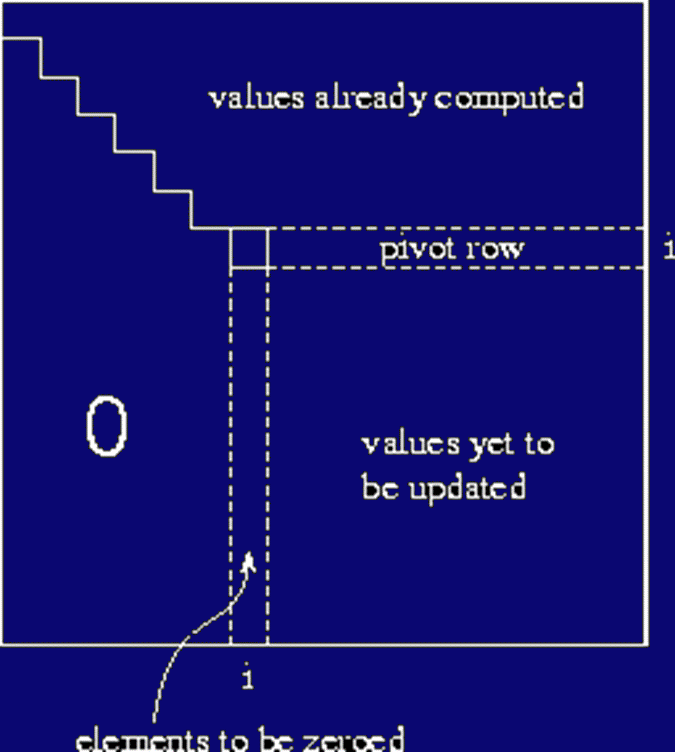
Gauss Elimination
- In step i the first non-0 element of the row i is
ai,i. The corresponding element in row j is
aj,i. To eliminate this element, we need to multiply row i
by -aj,i/ai,i and add it to row j.
- All the other elements on row j are computed as
aj,k = aj,k - ak,i
*aj,i/ai,i
- Partial pivoting: if ai,i is small, this could lead to
numerical errors. One can swap row i with the row containing the
largest value in column i and use it as pivot.
Parallel Implementation
- Division by rows. For every row i to be eliminated, each process
can compute a row j.
- For every element aj,k to be computed by Pj,
the process will need the element ai,k. It's the same
element for each process.
- The master in each step would be Pi. It would have to
broadcast a[i][k] for k from i to n-1.
- The processes would have to do the computations in synch.
- Complexity: O(n2) with O(n2) communication.
Parallel idea:
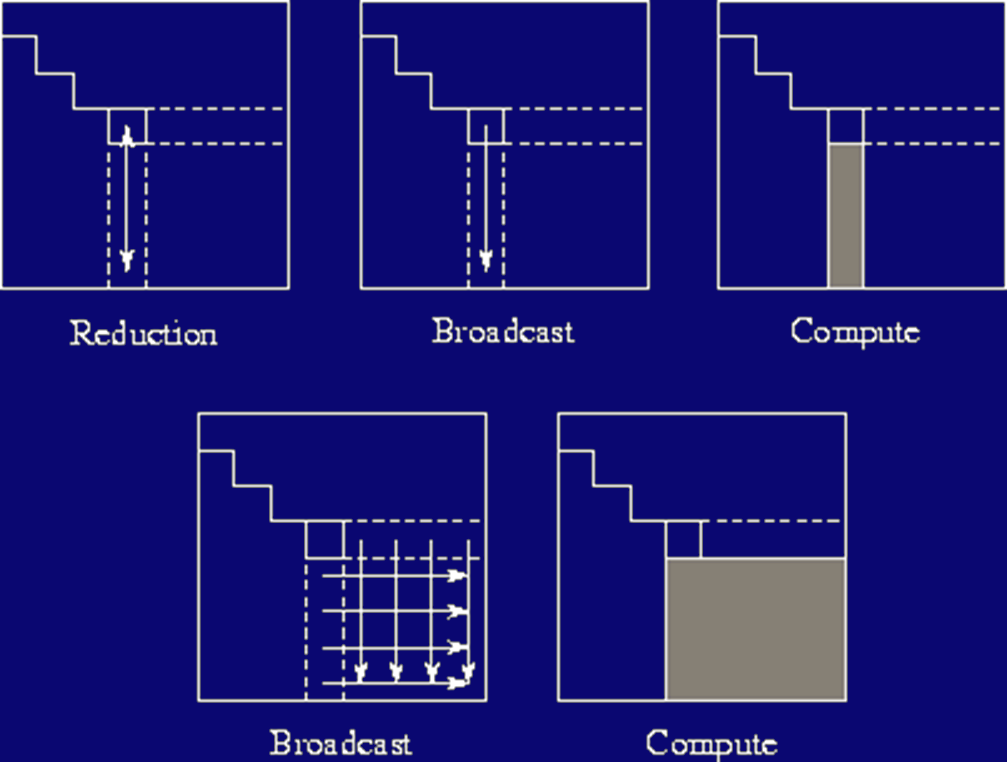
Improvements
- Broadcast the whole row in each iteration to reduce some of the
overhead.
- Each process stops computing after the elimination finishes its
row.
- If we use less than n processes, then we can assign them one row
at a time then start over. Process 0 would handle rows 0, np, 2*np,
.... Process 1 would handle rows 1, np+1, 2*np+1, etc.
- This is called a cyclic stripped partitioning and it
balances the load better.
Jacobi Iteration
- Computing a solution by repeatedly getting closer to it.
- Start from some random values for x. Then compute
xk+1i = (1/ai,i)(bi -
Sum j != i ai,j xk-1j)
- We repeat the procedure until the difference becomes
insignificant.
- It can be shown that xk with this procedure will converge towards
the solution of the system.
Parallel Version
- Each process can compute one value in x. With n processes, the
complexity of one iteration is n.
- For certain classes of matrices (such as, diagonally dominant) the
algorithm will converge to a "good" solution in O(log(n)).
Cholesky Decomposition
- Given a symmetric positive definite matrix A, the Cholesky
decomposition is a lower triangular matrix L such that A = L
LT.
- A matrix A is called positive definite if xT A x > 0
for every nonzero vector x.
- L is also called computing the square root of the matrix A.
- One of the fastest decompositions available, a special case of the
LU decomposition.
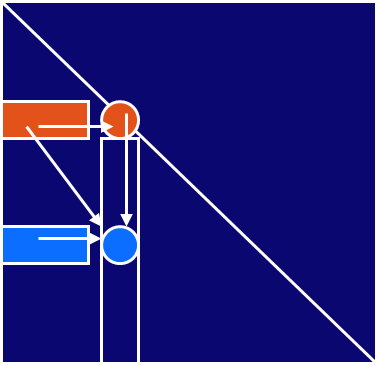
Method
- We start by computing for every column
Lii = sqrt(aii -
Sumk=1i-1 Lik2)
- Then the rest of the elements:
Lji = (1/Lii) (aij -
Sumk=1i-1 LikLjk)
- We notice that in the previous formula, computing an element
depends on the diagonal element on the same column and on elements
before it on the same line.
- The best way to compute this is having the threads advance in the
matrix parallel to the second diagonal.
Compute a Cell of L
float Compute_cell(i, j) {
x = a[i, j];
for (k=0; k < i && k < j; k++)
x -= a[i,k]*a[j,k];
if (i != j)
x = x/a[i,i];
else
x = sqrt(x);
return x;
}
Sequential Algorithm
Cholesky() {
for (i=0; i < n; i++)
for (j=i; j < n; j++)
a[i,j] = Compute_cell(i, j);
}
Workers
- Advancing on lines parallel to the second diagonal.
- Definition of such a line:
row + col = d
where d is constant for each line and goes from 0 to 2*(n-1).
Parallel Algorithm
Cholesy_Worker(thread_no) {
col = id;
for (d=0; d < 2*n-1; d++) {
if (d >= 2*col && d < n + col) {
row = d – col;
a[row,col] = Compute_cell(row, col);
}
Barrier(thread_no);
}
}
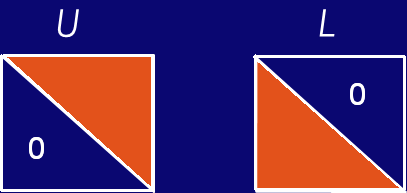
LU Decomposition
- Successive elimination of variables can be used to solve the
linear system Ax = b, method called Gaussian elimination.
- The LU decomposition factors the matrix A as a product of upper
and lower triangular matrices (U and L, respectively).
Aij = Sumk=1min(i,j)
Lik Ukj
- Then the system can be solved the following way:
- Solve Ly = b, where y is a vector,
- Solve Ux = y, where x is the solution to the initial equation.
Sequential Algorithm
- The elements on the diagonal of L can be chosen to be 1. This way
we can store both L and U in the matrix A itself.
- We don't need the previous rows in the computation. L[i,i] = 1.
Sequential Algorithm
for (j = 1; j < n; j++)
for (i = 1; i < j; i++) {
U[i][j] = A[i][j];
for (k = 1; k < i; k++)
U[i][j] -= L[i][k] * U[k][j];
}
for (i = j+1; i < n; i++) {
L[i][j] = A[i][j];
for (k = 1; k < j; k++)
L[i][j] -= L[i][k] * U[k][j];
L[i][j] /= U[j][j];
}
}
Parallel Version
- Usual decomposition: blocks of rows. Load balancing problems can
occur.
- Typical problem used for benchmarking and demos.
- Partial pivoting also used here: find the row with the largest
pivot and substitute the first one with it.
- Particularly efficient versions exist for sparse matrices.
- A
demo of PLapack
Linear Algebra Libraries
- Known ones in C/C++:
- LAPACK - linear algebra package
- ScaLAPACK - Scalable Linear Algebra Package
- PLAPACK - parallel Lapack, MPI-based
- PLASMA - Parallel Linear Algebra for Scalable Multi-core
Architectures
- MAGMA - Matrix Algebra on GPU and Multicore Architectures