Dana Vrajitoru
B583/C490 Game Programming and Design
Collision Detection in 3D Games
Collision Meshes
- Many game engines will allow (or require) the user to define a
collision mesh for any object in the scene for which we need to
detect the collision with other objects.
- The collision meshes are not displayed. They are only used to
compute intersections with other objects instead of the polygons
composing the object.
- The collision meshes are defined to make the computation easier:
boxes, spheres, cylinders. The fastest test is the one you don't do.
Coplanar Polygons Intersection
- Two coplanar polygons intersect if at least one vertex from one is
inside the other polygon, or if any two edges of the polygons
intersect.
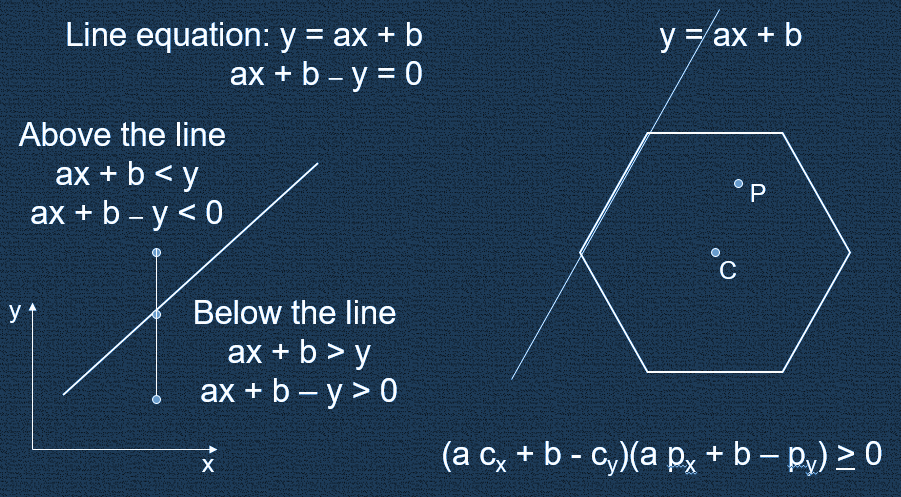
- Suppose we have a convex polygon and a point inside the polygon
(center). Then an arbitrary point is inside the polygon if it's on the
same side as the center of all the lines composing the polygon.
- Each polygon can be decomposed in triangles and the intersection
computed for each couple of triangles.
Polygon Collision

Point Inside a Polygon
Edges Intersection

Both the vertex check and the edge check are O(n2),
where n is the number of vertices in the highest polygon.
Two-Phase Algorithm
- In a scene with m objects, the algorithm must compute
O(m2) intersection of pairs of objects.
- A two-phase algorithm eliminates most of the collision
computations based on bounding boxes/spheres, etc. This is called the
broad phase.
- For moving objects, one can compute the bounding box of the entire
movement in the unit of time.
- To eliminate some of the intersections, a hierarchical tiling of
the space can be used (quad tree), or a coordinate sorting. A hash
table can be used to improve the sorting. This phase can be made
almost O(m) (linear).
Narrow Phase Collision
- Analyzes more carefully pairs of coordinates that are not culled
by the broad phase.
- Some of them would return the distance between non-intersecting
objects that can be used in movement planning.
- Some optimizations are available.
Lin-Canny Algorithm
- Lin-Canny closest features algorithm determines the closest faces
/ edges / vertices between two polyhedral objects.
- It uses the Voronoi regions for each feature (see next slide). Let
F be a feature and V(F) its Voronoi region.
- If A and B are the closest features of two polygons, and a and b
the closest points in each feature, then a in V(B) and b in V(A).
- The algorithm iteratively reduces the current closest features.
- Alternatives exist that consider the coherence of the scene over time.
Other Algorithms
- V-Clip Algorithm - an improvement of the Lin-Canny algorithm, also
using the Voronoi regions.
- (Gilbert, Johnson, Keerthi) - simplex-based algorithm. It
considers the polyhedra as clouds of points and computes a simplex
(point, bounded line, triangle, or tetrahedron) as a bounding region
of the Minkowski difference polyhedron (or TCSO).
- The TCSO (transitional configuration space obstacle) is a
collection of vectors obtained from the difference of points from the
two polyhedra.TCSO = {b-a | a in A and b in B}.
- Public libraries for collision-detection are available, like
I-Collide, V-Collide, QHull, ColDet.
- Collision detection in games:
video
3D Intersections
- Plane equation:ax + by + cz + d = 0
- The two sides of the plane are defined by ax + by + cz + d < 0 ax
+ by + cz + d > 0
- Two points P and Q are on different sides of the plane if
(aPx + b Py + c Pz + d)*
(a Qx + b Qy + c Qz + d) < 0
Crossing a Polygon
- First we must check that the origin O and the destination D are on
different sides of the plane.
- Plane: ax + by + cz + d = 0
- Line segment:
D = O + (t Lx, t Ly, t Lz),
where L is the direction vector
- P the intersection point is defined as satisfying both the plane
and the line segment equations.
- Then we must check that P is inside the polygon based on the
equations described before.
Non-Coplanar Polygons
- Compute the intersection line based on the plane equations.
- Check if the line intersects any of the polygons.
- If it intersects both, then a point on this line must be on an
edge of one polygon and at the same time inside the other one.
Box - Sphere
Moving Past a Sphere
- When a box moves from A to B in one frame, it may collide with
a sphere on the way.
- We have to project the center of the sphere on the movement line,
and if the distance to the line is less than the max and P is between
A and B, then we must compute the collision between the objects at the
point P.
- The distance between C and a line of equation ax + bz + c = 0 is
(a cx + b cz + d)/sqrt(a2 +
b2)
Motion and Collision
- When an object hits a surface with a certain velocity, it may
bounce from the surface depending on the object elasticity.
- A perfectly elastic object bounces from a surface with a speed
equal to its original speed, but in a direction symmetric with respect
to the surface normal.
Imperfect Bouncing
- If the object is not perfectly elastic, then part of the energy
resulting from the collision is absorbed.
- The speed can be decomposed in a vector tangent to the surface and
one normal to the surface.
- The tangent component doesn't change.
- The normal component is partially absorbed by a factor e depending
on the two surfaces.
vout = vtout + vnout =
vtin - e vnin
If |N|=1, then vnin = N vin (scalar product)
vtin = vin - vnin
Momentum
For a moving object, its momentum is defined by the mass times the
speed:
p(t) = m v(t)
Newton
- An example of physics engine.
- Multi-platform, free, based on OpenGL.
http://newtondynamics.com
- Popular in combination with some game engines Irlicht and Ogre.
- Based on the idea of defining objects - bodies - with some
geometry, but also with collision geometry associated with them.
Program Structure
- All of the objects are created within a Newton World.
- Define physical properties of the objects. Some of these can be
collision meshes, mass, joints and degrees of freedom.
- Add forces to them. Add torque.
- Update the whole system by calling a Solver.