C481 B581 Computer Graphics
Dana Vrajitoru
Ray Tracing
Global illumination model.
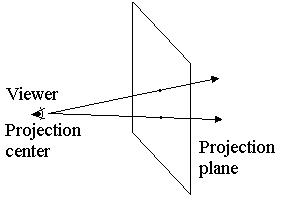
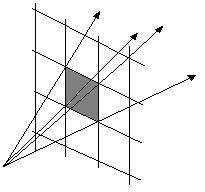
Consider the color of each pixel in the projected image as being
determined by a ray of light arriving on this point according to the
projection rule.
The Method
-
Send a ray from each pixel to the reverse direction of the light coming
in.
-
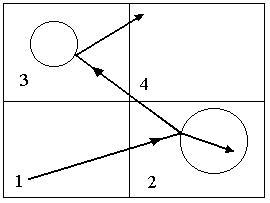
Compute the closest intersection of this ray with any object.
-
Consider the ray in the direction of each light source from the intersection
point (shadow rays).
-
For each of them, check if the ray intersects another object or not. Compute
the local contribution from the rays without intersection.
-
Add to this the light obtained by reflection and refraction in this point
computed recursively.
Recursive Reflection and Refraction
-
Determine the reflected and refracted (transmitted) rays from the current
position based on the normal to the surface and on the specular and transparency
properties of the surface.
-
Apply the algorithm recursively for each of these two rays.
-
Stop when reaching a source of light.
-
Stop when the ray doesn't intersect any other objects. In this case, add
some background color.
-
The final color in the pixel adds the light from all the resulting rays.
-
The recursion can go for a limited number of steps.
The algorithm
color trace(point p, vector d) { //page 658 in the textbook
color local, reflected, transmitted;
point q; vector n;
q = intersection(p, d, status);
if (status == light_source)
return light_source_color;
if (status == no_intersection)
return background_color;
n = normal(q);
r = reflect(q, n); t = transmit(q, n);
local = phong(q, n, r);
reflected = trace(q, r);
transmitted = trace(q, t);
return (local + reflected + transmitted);
}
The Ray
A ray is given by a starting point (x0, y0,
z0) and a unit vector (xd, yd, zd).
A point on the ray is defined by:
x = x0 + t xd
y = y0 + t yd
z = z0 + t zd
where t > 0.
The intersection between the ray and any surface S is given by the
condition:
there exists t such that (x, y, z) is on S.
The problem of the intersection is in general complex.
Intersection with a Box
-
A box is given by the equations xmin < x < xmax,
ymin < y < ymax, zmin < z <
zmax.
-
The condition for the ray to intersect the box is
-
xmin < x0 + t xd < xmax and the
same for y and z.
-
This gives us a system of 6 equations in t. If the intersection of their
sets of solutions is not empty, then the ray crosses the box.
-
In general, defining a bounding box for every object can reduce the computations.
Intersection with a Sphere
A sphere is defined by a center (xc, yc, zc)
and a radius r. Then the distance between the center of the sphere and
the point on the ray is
d2(t) = (x0 + t xd - xc)2
+(y0 + t yd - yc)2 +(z0
+ t zd - zc)2 = a t2 + b t
+ c
The minimum of this equation is obtained for tmin = -b/(2a)
and the value is dmin = d(tmin)
If dmin <= r, then the ray crosses the sphere.
To compute the intersection, we must solve the equation d2(t)
= r2 .
Agent-Based RT
-
Divide the scene in volumes (can use octrees).
-
A different agent is responsible for each voxel.
-
The agent computes the intersection of any ray with objects belonging to
that region.
-
When the ray leaves its region, the agent activates another agent.
-
Can be done in parallel.
Ray Supersampling
-
Divide each pixel in several regions.
-
Compute the value for each region.
-
Average these values.
-
The subpixels can be chosen randomly according to a fairly even distribution.
Links:
POV Ray
http://www.siggraph.org/education/materials/HyperGraph/raytrace/rtrace0.htm
Internet ray tracing competition.
http://www.youtube.com/watch?v=XVZDH15TRro
http://www.youtube.com/watch?v=mtHDSG2wNho
Photon mapping
http://www.youtube.com/watch?v=ReI7AsF3nnE
http://www.youtube.com/watch?v=uwDu_q212SY